

홈 > 표준화 참여 > TTA간행물 > ICT Standard Weekly



[IT 응용] RTC 표준 완료 및 Robotic Localization 표준 제안
OMG(Object Management Group) 표준화 회의는 2007년 12월 9일부터 14일까지 미국 캘리포니아 주 Burlingame에서 열렸다. 전체적으로는 500여 명의 회원이 모인 행사였으며, 로봇 분야에서는 20명의 회원이 참여하여 표준화 작업을 하였다. 금번 회의의 주요 이슈는 RTC(Robot Technology Component) 표준 완료 및 Robotic Localization 표준안의 제안이었다. 이외에도, 지능형로봇의 요소기술과 관련하여 2명의 초청 강사의 발표가 있었고, Robotics DTF(Domain Task Force) 산하의 2개의 WG에서는 향후 표준화할 표준화 과제의 RFP와 로드맵을 작성하였으며, 로봇 표준화 활동을 국제적으로 활성화시키기 위하여 홍보자료를 작성하였다.
RTC(Robot Technology Component) 컴포넌트 표준 완료
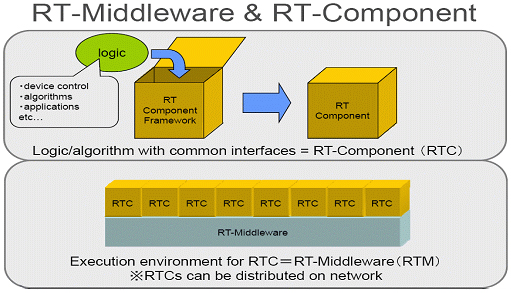
RTC 표준은 지능형서비스로봇의 소프트웨어 분야에서는 세계 최초의 표준 규격이 되며, 이 규격 안은 2006년 9월 29일에 OMG TC회의에서 승인되었다. 이후, 1년에 걸쳐서 RTC 컴포넌트 규격의 보완과 규격에 대하여 소프트웨어를 성공적으로 구현함으로써 이 규격은 2007년 12월 회의에서 OMG의 공식 규격으로 채택되었다. 이 표준에서는 로봇에 들어가는 소프트웨어 컴포넌트들과 미들웨어와의 인터페이스가 가능하도록 필요한 기준 규격을 제시하였다. 이를 준용함으로써 많은 종류의 소프트웨어 컴포넌트들이 로봇 안에서 조립되어 사용할 수 있도록 하자는 취지이다. 특히, 로봇에 내장되는 컴포넌트 안에 들어가는 임베디드 소프트웨어에 이 규격을 적용하게 되면 내장형 하드웨어 컴포넌트를 소프트웨어적으로 인터페이스 시키는 데에 문제가 없다. 이 규격을 따름으로써 향후에는 로봇의 컴포넌트를 만드는 기업도 로봇사업에 참여할 수 있게 되므로, 이 규격은 중요성이 크다. 아래 그림은 여러 종류의 컴포넌트를 RTC 프레임워크를 통하여 표준형으로 만들고, RT 미들웨어가 이를 수용하여 컴포넌트들을 조립하는 모습을 보여 준다.
이번 Burlingame 회의에서는 일반적인 로봇 소프트웨어 컴포넌트를 RTC 규격을 따르는 컴포넌트로 만드는 데모를 하였고, 이에 대한 튜토리얼 강의를 하였다. 현재의 RTC 규격은 코바 기반의 컴포넌트 모델이다. 앞으로 여러 플랫폼 상에서 운영되도록 개발될 것이며, 향후에는 RTC에서 부족된 부분을 표준화 해야 할 것이다. RTC의 개발은 일본과 미국에서 함께 만들었으나, 일본이 RT 미들웨어와 연결시켜 프레임워크를 상용화하는 수준까지 구현함으로써 이 분야에서 선두로 나서게 되었다. 한국도 빠른 시간 내에 RTC 규격을 구현하고, 산업체에 보급하여야 한다.
RTC는 OMG 로보틱스 표준화의 첫 번째 규격이지만, 그 영향력은 상당히 높을 것으로 기대된다. 앞으로 만들어질 대부분의 소프트웨어 컴포넌트는 RTC 규격을 준수해야 하기 때문이다. 한국이 이를 채택하든 안 하든 이 규격은 앞으로 대세가 되기 때문에 한국의 표준화 정책에 있어서 중요하게 다루어야 할 것이다. 우리나라는 채택된 새로운 표준 규격의 구현에 적극적으로 참여하면서, 자국의 기술을 국제표준으로 제안하여 국제시장 선점에 대비해야 한다.
Robotic Localization Service 표준안 제안
한국과 일본이 제안한 Robotic Localization Service RFP에 대한 표준제안이 양국에 의하여 이루어졌다. 이번 회의에서는 이에 대한 표준안 발표들을 하였고, 양국에서 제안한 내용을 합치는 토의가 이루어졌다. 일본 측은 주로 옥외용의 로봇 위치인식의 내용이고, 한국 측은 실내용 로봇 위치인식이 주 내용이어서 이에 대한 협의를 하였다. 또한 서로간의 입장 차이가 커서 짧은 시간 내에 합의가 이루어지기는 어려울 수가 있다.
일본과 한국 모두 표준안을 연내에 완성시키기 위하여 긴밀한 협력과 협의를 하기로 하였다. 한국은 위치인식 관련하여 더 많은 기관들이 대응전략을 마련하고, 함께 참여하여야 한다. 현재, 일본은 5개 기관이 공동으로 일하고 있고, 한국에 2개의 기관이 일하고 있으므로 수적으로 열세이다. 이를 극복하기 위하여 많은 기관들의 참여가 필요하다. 향후의 일정으로는 6월 회의까지 공동 표준안을 제안하려고 하고, 늦어도 12월까지 최종안을 통과시키기 위하여 서두르기로 하였다.
Human Robot Interaction(HRI) RFP 작성 협의
HRI RFP에 대한 작업이 그 동안 2년간 이루어졌으나 함께 작업할 대상 기관이 없어서 진전이 안되었으나, 이번에는 ETRI, 삼성전자, AIST가 같이 협의를 할 수가 있었다. 한국측은 그 동안 추진하여 오던 영상 및 음성 기반의 사용자인식 컴포넌트의 API에 대한 표준화를 위한 RFP를 제안하였다. 일본에서는 이에 대하여 더 협의가 필요하다고 하였다. 한국측은 이번 회의에서 나온 내용을 중심으로 RFP를 작성하기로 하였으며, 2008년 12월까지 RFP를 완성하기로 하였다. HRI분야도 일본과 한국의 더 많은 기관들의 참여가 필요하며, 기관들의 참여 노력을 하기로 하였다. 미국, 뉴질랜드 및 유럽의 참여를 촉구하기로 하였다.
결론
금번 OMG Burlingame 회의에서는 RTC(Robot Technology Component) 컴포넌트 규격을 공식 채택하였고, 2008년 2월경에 OMG 공식 규격서로 발표될 예정이다. 이 규격은 세계 최초의 로봇 소프트웨어 컴포넌트의 인터페이스 규격이 되었다. 향후 이 규격은 로봇사업에서 로봇을 부품화하고, 로봇 개발 시에 많은 종류의 컴포넌트로 조립될 수 있도록 하는 컴포넌트 규격으로서의 중요성이 크다. 이번 회의에서는 이 규격에 대한 강의가 있었으며, 일반 컴포넌트를 RTC규격으로 만드는 프레임워크를 구현하여 소개하였다. 앞으로 많은 종류의 컴포넌트들의 표준화는 이 규격을 따라야 할 것이다.
또한 OMG 로봇분과에서 두 번째 표준이 될 Robotic Localization Service 표준이 제안되었다. 이 규격은 자율주행 기능의 핵심 기능이 될 위치인식 서비스 컴포넌트의 표준 규격이 된다. 이번 회의에서는 일본과 한국간의 제안한 내용에 대한 발표와 차이점을 확인하였다. 앞으로 1년 이내에 차이점을 협의하여 1개의 표준안으로 만들 계획이다. HRI의 표준화는 진행이 좀 늦고 있는데, 이번 회의에서는 RFP를 작성하는 일이 조금 진전되었다. 늦어도 2008년 12월까지는 RFP를 완성하여 공고할 계획이다.
OMG Robot 그룹의 표준화 활동은 국제적으로는 활발한 편이다. 그러나, 로봇에서 필요한 표준이 많은 데에 비해서는 아직 진행 속도가 느리다. 표준화에 대한 더 많은 노력을 통하여 산업체에 기여하여야 할 것이다. 한국과 일본은 이를 위하여 많은 노력을 하고 있으며, 국제 표준화를 선도하고 있다. 조만간 미국, 유럽, 중국 등의 국가들의 기관들의 참여가 있을 것으로 본다.
* 본 글은 저자의 의견일 뿐 TTA 기관의 입장과는 무관합니다.




